They say that the best weapon is the one you never have to fire. I respectfully disagree. I prefer the weapon you only have to fire once.
- Tony Stark, Iron Man (2008)
For once, I actually disagree with Tony Stark. In this ever developing age of computing and cyber warfare, most weapons are not really fired. Rather, most warfare occurs rather passively with spy missions or other reconnaissance missions being used to get military secrets from other countries. UAV's like drones and quadcopters are now becoming commonplace in a country's military arsenal and this is becoming a much larger part of military operations than actual invasion and the active act of war. Stealing IP of a country proves to be as effective as the active act of war.
Introduction
This year the Tan Kah Kee Young Inventor's Award (TKKYIA) 2016 launched and as usual we participated in the Defense Science section of it. Defense Science is quite important as we need to equip the country with the required tools and equip
So, I went on Carousell and bought a Wireless USB card, being a poor guy with no income. The seller had used it quite a bit, but I was fine with second hand equipment. It came with a USB 3.0 extension cable, capable of 802.11ac at 867Mbps. And the WPS button on the side of the adapter made me cringe.
As usual, I decided to take it apart.
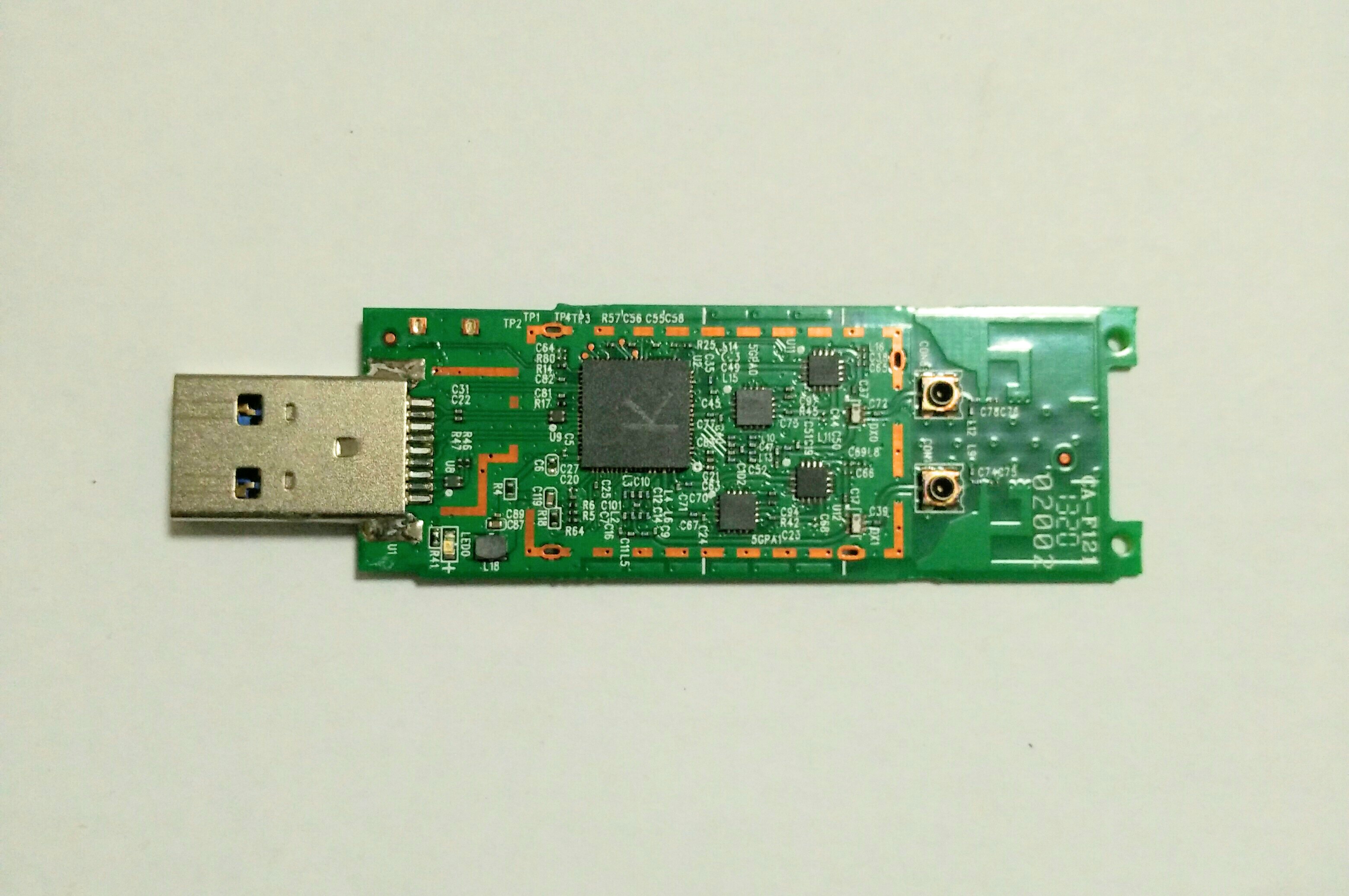
While I was researching on this adapter, I stumbled upon the WikiDevi page for this adapter (WikiDevi is a really cool site to find wireless equipment information, like routers and radio chipsets). It uses a Realtek RTL8812AU chipset.
Because I originally intended to find a dual band USB adapter for wireless sniffing, I went on to find Linux driver support for the RTL8812AU chipset. Because this chipset seems to be quite recently released, driver support information I found was contradictory, but the Gentoo wiki confirmed driver support. It's currently provided by two open source drivers, this one written from scratch and this one based on the Realte
daydreams are nice
you get to look at the datacenter you are gonna build
and all the twisted pairs you imagine yourself routing
and the switches and patch panels
then you fill each 4U slot with those hotswap storage servers
and 2U slots with application servers
and then you look at the SFP+ connectors
with fiber cables stuck inside
and all the link aggregation
with 20Gbps throughput from a single node
then you imagine the processors in each node
probably a dual socket motherboard
with two Xeon 8 core processors
and that low clock rate
the SSDs that are the drives
epic cable management inside too
dont forget the router running pfSense
and the 10Gbps connection to your ISP
all the application servers running CoreOS
all the management and data storage servers running Ubuntu
and so your storage nodes
are all btrfs
in the btrfs RAID10 configuration
exposed using NFS to your app servers
your app servers
all would run rkt containers
with 4 designated as etcd leaders
but due to cost constraint
Introduction
The quadcopter industry has been booming recently and along with that has come a surge of new flight controllers. Along with the popular APM and Naza platforms, flight controllers like the Naze 32 are also taking front stage. Recently, I decided to build an autonomous quad from scratch and I found myself stuck. I simply could not find a capable flight platform for a fully autonomous flight platform with a vision system. All the flight controllers today required some form of seperate computer like the Raspberry Pi to carry out vision robotics. So, I decided to do myself a favor and go make a fully autonomous quad platform.
The EdiPlane board
The EdiPlane board is Edison-Arduino integrated board which is intended for use in a fully autonomous drone/rover platform. It takes the ATMEL ATMEGA 328 chip and combines it with the computing power of the Intel Edison to get a perfect combination of computing power and I/O pins.

How it works
The EdiPlane is simply a board which allow
PCB making in Singapore is a topic I've seen not many people talk about. Being one of the bustling cities in South East Asia one would expect to receive quality PCB making services locally in Singapore. On contrary, PCB making in my experience has not exactly been a honeymoon experience one would hope for. In this post, I will share my experience with making PCB's in Singapore and talk about the pros and cons of making PCB's locally.
Experience
I was trying to make a PCB for a school research project last year. More specifically, I was trying to make a Intel Edison based flight controller for a custom drone. Another post will be done detailing the PCB itself. Anyway, because along with the normal SMD connectors the Intel Edison connector cannot be soldered by hand, I required assembly services along with the conventional fabrication requirements.
Because of this limitation, I needed to build it locally to avoid incurring shipping costs and complications of sending the components overse
This is the first installment in a series of posts which documents my journey into room automation. We have come up with a basic plan and bought essential materials which I will be outlining in this post. In the next post, I will be talking about the installation of the system, in the third post I will talking about the software be the project and in the last post I will conclude with a study on its feasibility and usefulness.
The Plan
My room is an average sized room with the normal functionality. I have 1 light, 1 fan and an air-conditioning unit which needs to be remotely controlled. I do have a desktop PC in my room which can potentially used as the controller unit. I also need a passcode lock security system to be implemented as my projects and expensive equipment are going to be stored in my room.
The current plan is to use the PC as the main controller and the Arduino Pro mini as the micro controller. The PC can send serial commands over wifi to the Pro Mini which is connected t
Recently in version 1.9.5, NGINX introduced their experimental HTTP/2 support, purposefully dropping SPDY protocol support in favour of HTTP/2. Having no SPDY support in NGINX would leave about 60% of users capable of SPDY/3.1 having to fall back to HTTP/1.1 connections, thus lowering performance.
So being interested in webserver performance, I decided to do some small benchmarks, as a rough guide to how NGINX and nghttp2 may perform in a deployed environment. Of course, my tests are an inaccurate representation of real life performance: I'm only serving a single 100kb text file through NGINX.
Setup
The tests are done on my Ubuntu machine, the server this very site runs on. It's an i7 4790 desktop with 20GB of RAM, running Ubuntu 15.10 Desktop.
I'm running three tests:
- NGINX 1.9.7 with HTTP/2
- nghttpx using the above as a backend over HTTP
- NGINX 1.9.7 with SPDY/3.1
And here are my compile flags:
nginx version: nginx/1.9.7
built by gcc 5.2.1 20151010 (Ubuntu 5.2.1-22ubuntu2)
built wit
Introduction
In October, the whole team participated in the Singapore Space Challenge (SSC) 2015 in the Unmanned Aerial Systems category. Teams had to conceptualize a system to perform inspection operations on aircraft using UAVs. UAVs are already used in many other industries and also recreation purposes. UAVs can be applied to the Maintenance, Repair and Overhaul tasks on aircraft allow for timely access to parts of an aircraft normally difficult to inspect. Furthermore, the mission specifications state that:
The aerial system can comprise of more than one UAV. Systems comprising of more than 2 UAVs will be favorably graded, provided this does not impact the practicality and viability of the concept and solutions.
We started planning our project based on 4 fundamental objectives: Safety, speed, reliability and ease of operation. Some issues with the mission parameters became immediately clear:
- There would be no GPS signals in a closed hangar where the inspection will likely take p
Recently, team MakerBreak (consisting of me, Isaac and Sudharshan) competed in the student category of Hackathon@SG. The competition theme this year was on "Smart Nation", where we are to work on a project related to building a smart nation. There was even hardware provided by the sponsors, including the Nabu X, VR One and Tweeq.
Of course, as adventurous students, we took the VR One as we wanted to play with VR. It was a nice piece of equipment, being much much better than the Google Cardboard.
We came up with a few ideas, before the hackathon. Most of the students there were studying in university and junior college, and we were among the few secondary students there.

Armed with a (Relay Shield), WiFly RN-XV module, an Arduino Uno, a power adapter, soldering irons, wires