For SAFMC 2016, we built a custom frame to accommodate what we needed. I call it the Tic Tac Toe.

Navigation
Before working on the frame, we first decided on a navigation system. To avoid reinventing the wheel, we chose a Naze32 to provide basic flight stabilization for our quad. It is tried and proven to be reliable, especially with an open source firmware with active development.
Onboard accelerometers and gyros allow the Naze32 to provide stabilization for the quad. It is most often used for RC micro race quads (watch out for a post!). Higher level navigation will mimic an RC input into the Naze32, hence controlling the attitude of the craft.
Working on a budget, we decided to give ultrasonic sensors a try. Data from the sensors is processed by the onboard Pi with a custom algorithm to provide instructions for the Naze32.
Frame
Hence with the navigation system set, we built our frame around that. The concept of the tic tac toe frame came about when we realised it could solve a few
This is it. It has finally been one year since the SentiBot's project launched. This project is older than the existence of MakerForce itself. Let's take a look at some memorable moments from the past year.
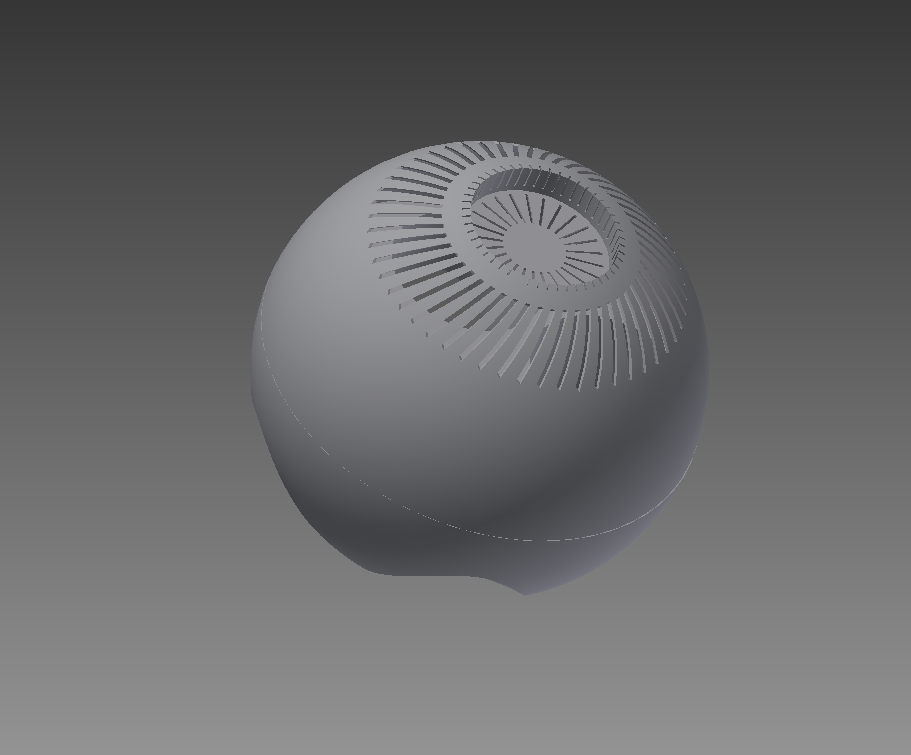
This was the first ever prototype model created of SentiBots. It has evolved into a completely different model today.
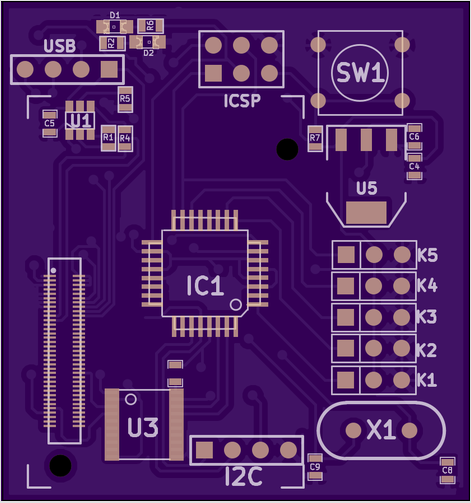
Here is an early snapshot of the EdiPlane PCB created last year. We very quickly realized that a spherical shape is just pointless and makes it hard to mount stuff inside.
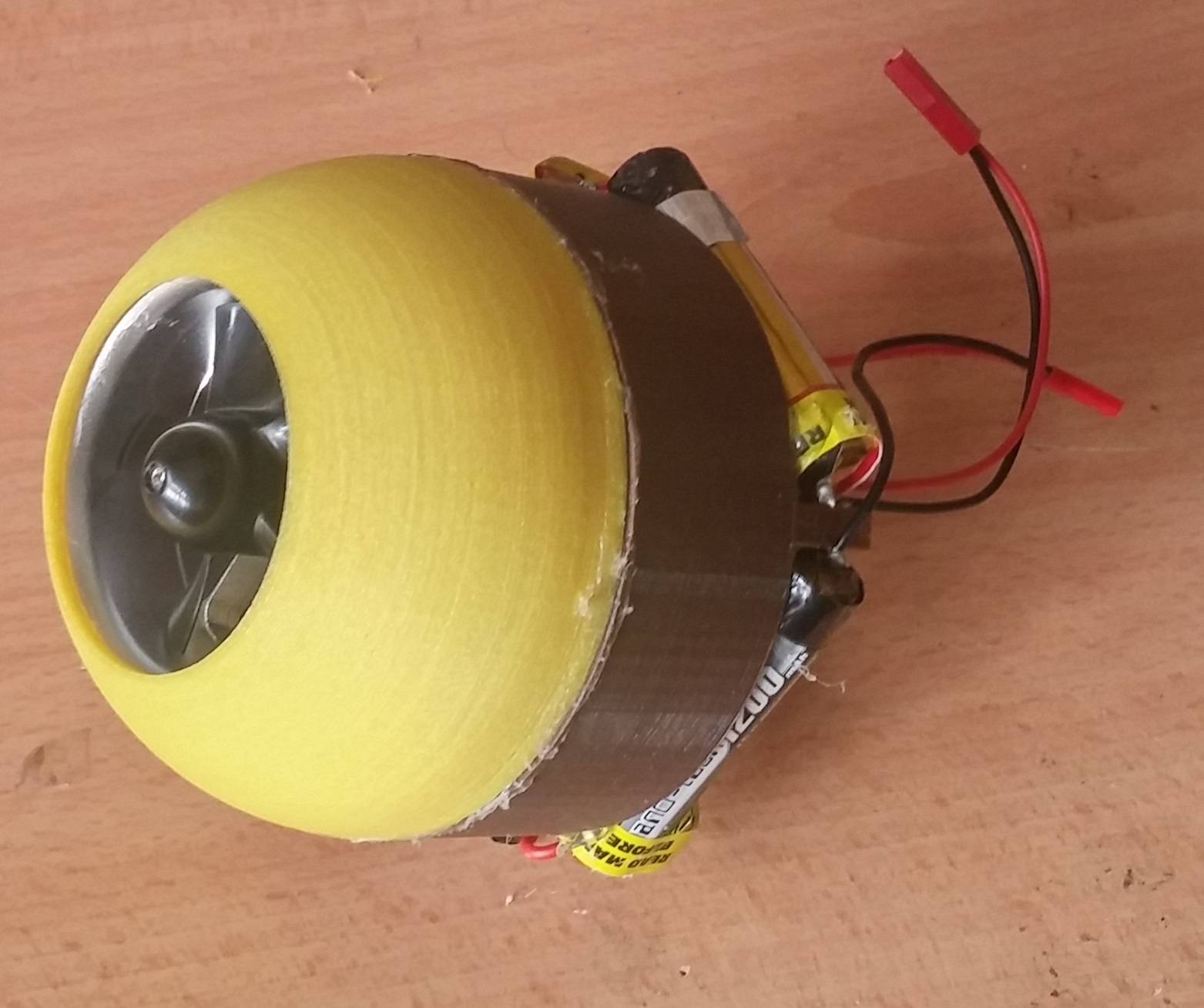
Prototype 1- codename Prime.So naturally, we extended into a bean. Also beans are awesome. The battery mounting was still a bit iffy but its an improvement. This model did not fly.

Prototype 2- codename Snow White. Snow white was a very interesting prototype as it is the only SentiBot created to have a nylon frame and its extraordinarily durable. This still uses the single EDF propulsion method.
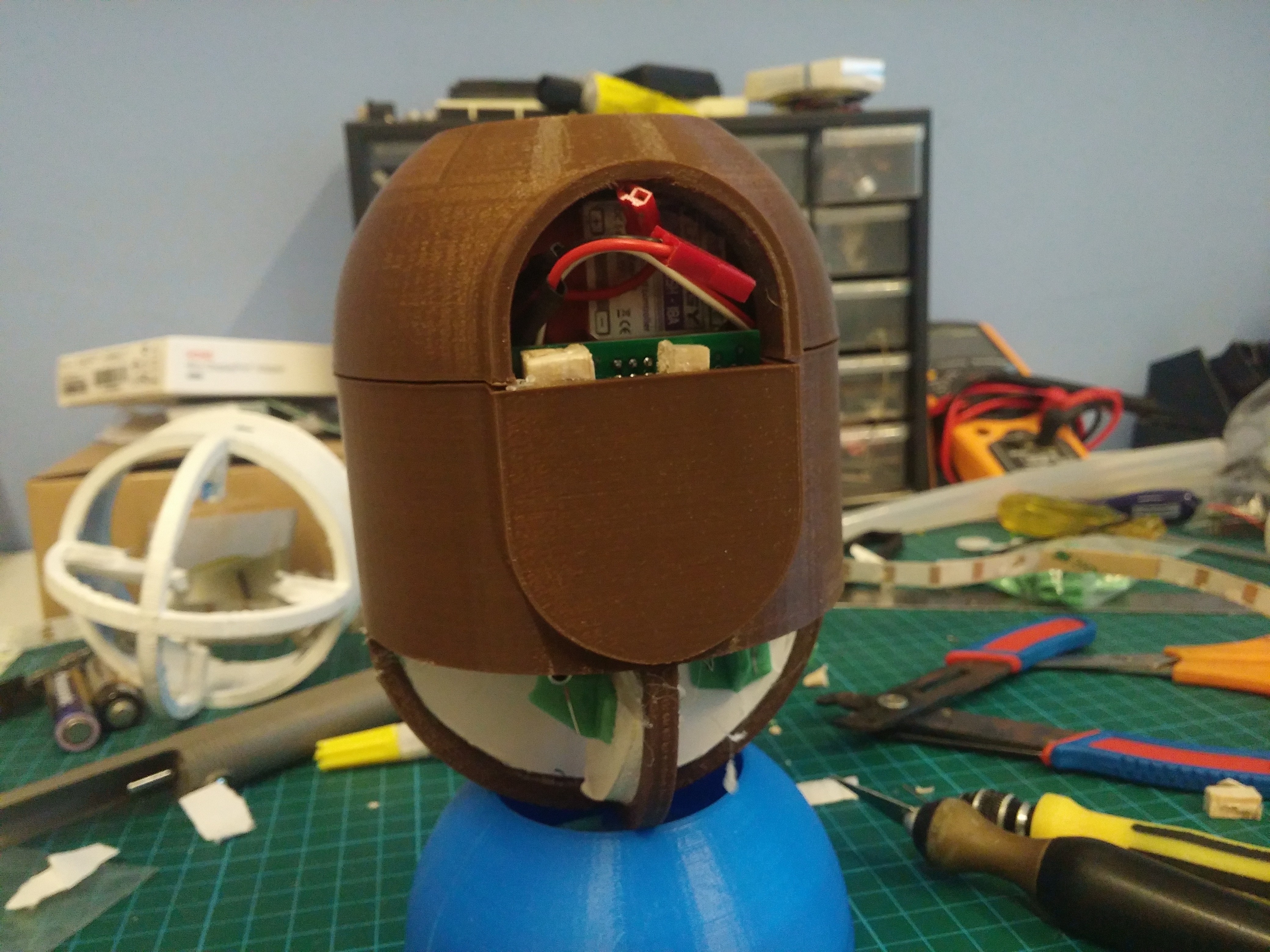
Prototype 3- codename Sentinel. This was the first SentiBot to have the hump to expand upon the spa
It paid off.
SAFMC is an annual competition held by DSO, with five competition categories for different types of flying machines. This year, we decided to give Category D2 a try, to prepare for next year (and get a Judges Award again).
In category D2, we have to build and fly an autonomous drone through an obstacle course shared between category D1 and D2. The course is a artificial setup consisting of mostly walls.
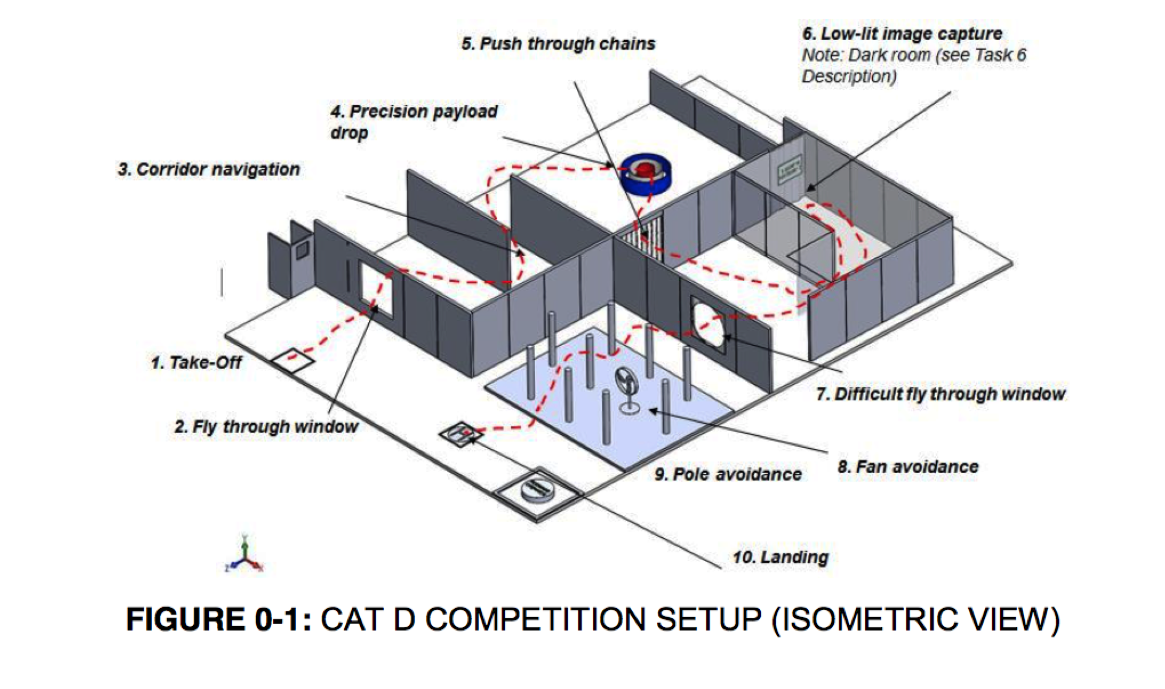
The bullseye in the center of the hall is a ball drop, and following that there is a low-light area where we have to obtain a photograph of the code printed on the board. When we participated last year, it was an open area.
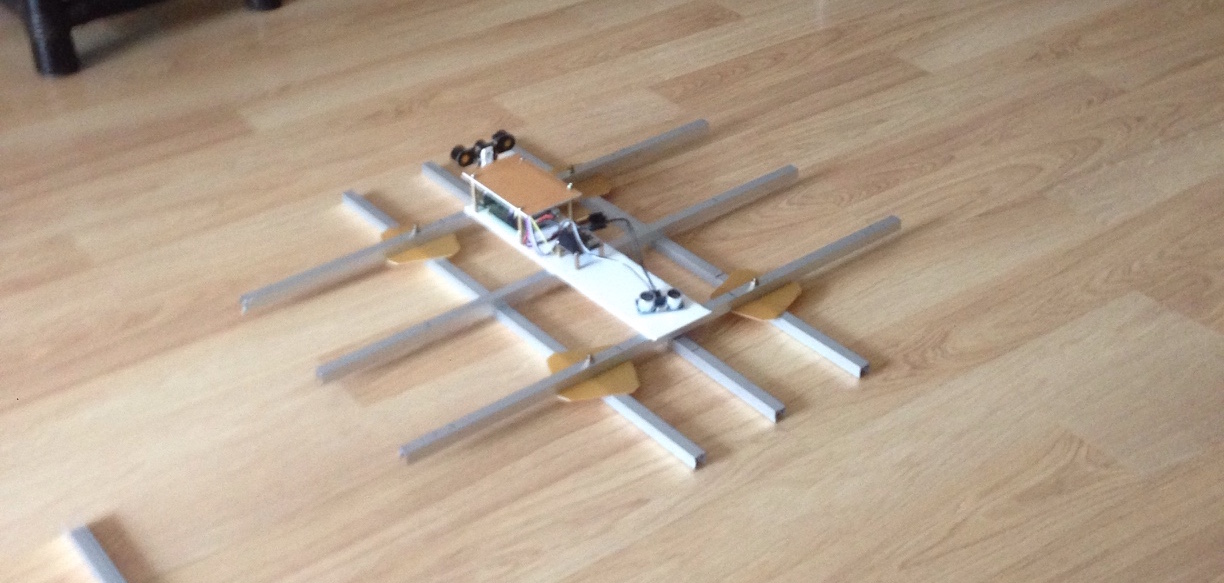
In December, we started work on a frame design. We chose a tic-tac-toe frame design because it was easy to build. For electronics, we used a Naze32 flight controller and a Raspberry Pi for our processing, mostly because we wanted to use the Raspberry Pi and not have any PWM problems.
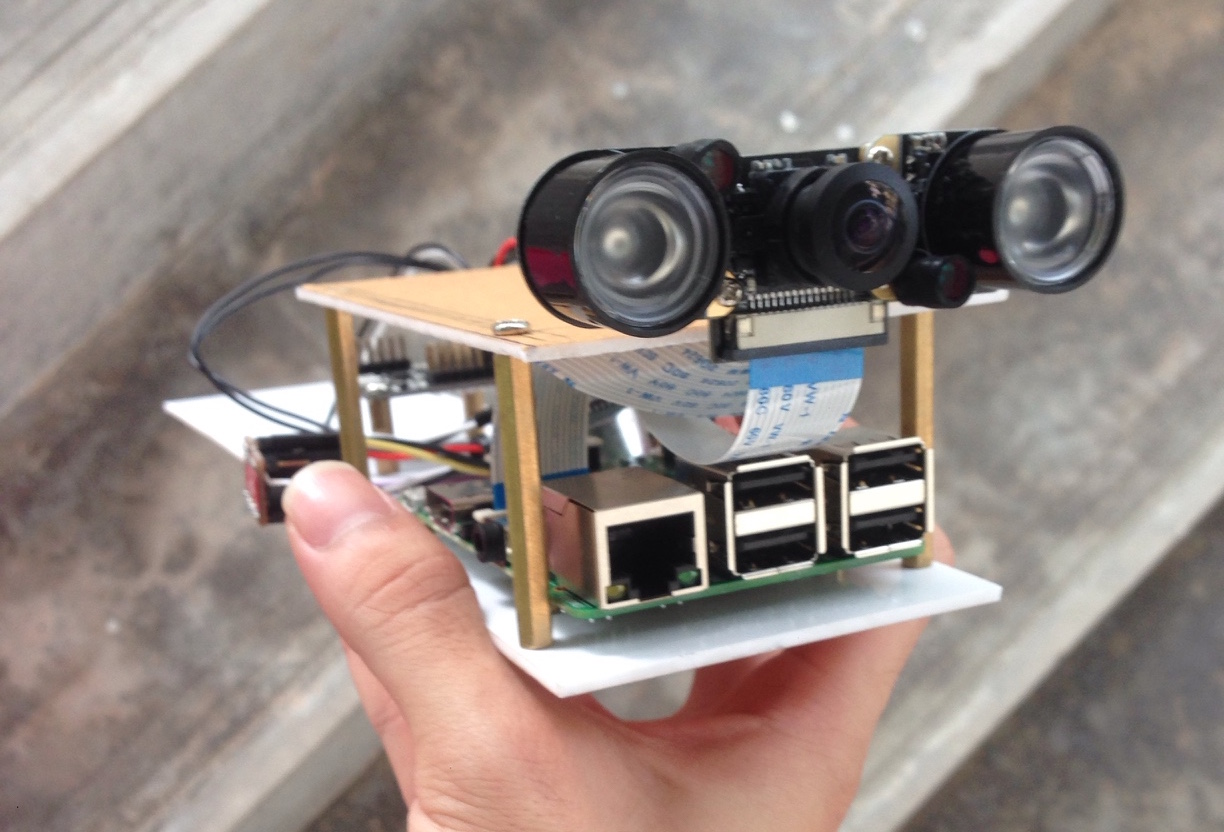
The camera was supposedly for recording a video for playback later t
They say that the best weapon is the one you never have to fire. I respectfully disagree. I prefer the weapon you only have to fire once.
- Tony Stark, Iron Man (2008)
For once, I actually disagree with Tony Stark. In this ever developing age of computing and cyber warfare, most weapons are not really fired. Rather, most warfare occurs rather passively with spy missions or other reconnaissance missions being used to get military secrets from other countries. UAV's like drones and quadcopters are now becoming commonplace in a country's military arsenal and this is becoming a much larger part of military operations than actual invasion and the active act of war. Stealing IP of a country proves to be as effective as the active act of war.
Introduction
This year the Tan Kah Kee Young Inventor's Award (TKKYIA) 2016 launched and as usual we participated in the Defense Science section of it. Defense Science is quite important as we need to equip the country with the required tools and equip
Introduction
In October, the whole team participated in the Singapore Space Challenge (SSC) 2015 in the Unmanned Aerial Systems category. Teams had to conceptualize a system to perform inspection operations on aircraft using UAVs. UAVs are already used in many other industries and also recreation purposes. UAVs can be applied to the Maintenance, Repair and Overhaul tasks on aircraft allow for timely access to parts of an aircraft normally difficult to inspect. Furthermore, the mission specifications state that:
The aerial system can comprise of more than one UAV. Systems comprising of more than 2 UAVs will be favorably graded, provided this does not impact the practicality and viability of the concept and solutions.
We started planning our project based on 4 fundamental objectives: Safety, speed, reliability and ease of operation. Some issues with the mission parameters became immediately clear:
- There would be no GPS signals in a closed hangar where the inspection will likely take p