AngelHack is an annual hackathon organised on the international level with winners from each country competing with each other internationally. It attracts attention from all over the world and takes its place as one of the more well-known hackathons in Singapore. In addition, they have awesome prizes ranging from sponsor prizes to a free inclusion into their Hackcelerator program for startups.
This year AngelHack was held at the Hub which is a coworking space in Singapore. Although the chosen location was very well outiftted for the hackathon with all the necessary facilities requires and it provided the ideal environment for hacking and working, it was a bit too cramp for everyone and the size of the location could definitely have been bigger. However, that was not much of a problem as once we started working on our project we really couldn't be bothered with petty details like that. The Hub also provided cups and glass bottles of water.
For the first 3 hours, we spent our time think
It paid off.
SAFMC is an annual competition held by DSO, with five competition categories for different types of flying machines. This year, we decided to give Category D2 a try, to prepare for next year (and get a Judges Award again).
In category D2, we have to build and fly an autonomous drone through an obstacle course shared between category D1 and D2. The course is a artificial setup consisting of mostly walls.
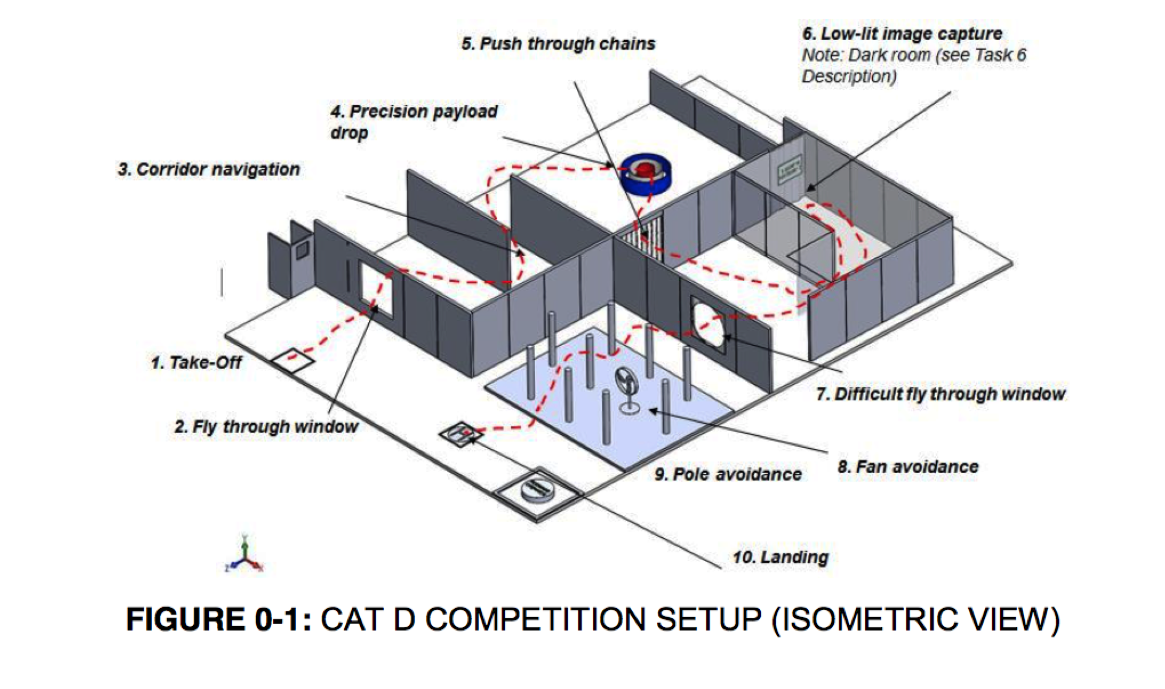
The bullseye in the center of the hall is a ball drop, and following that there is a low-light area where we have to obtain a photograph of the code printed on the board. When we participated last year, it was an open area.
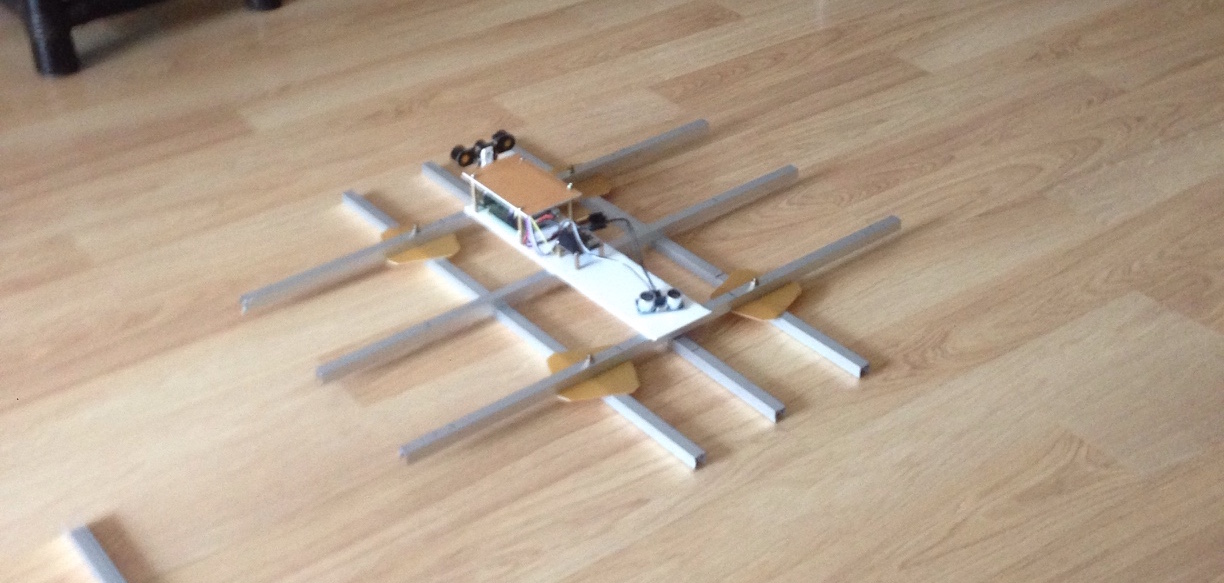
In December, we started work on a frame design. We chose a tic-tac-toe frame design because it was easy to build. For electronics, we used a Naze32 flight controller and a Raspberry Pi for our processing, mostly because we wanted to use the Raspberry Pi and not have any PWM problems.
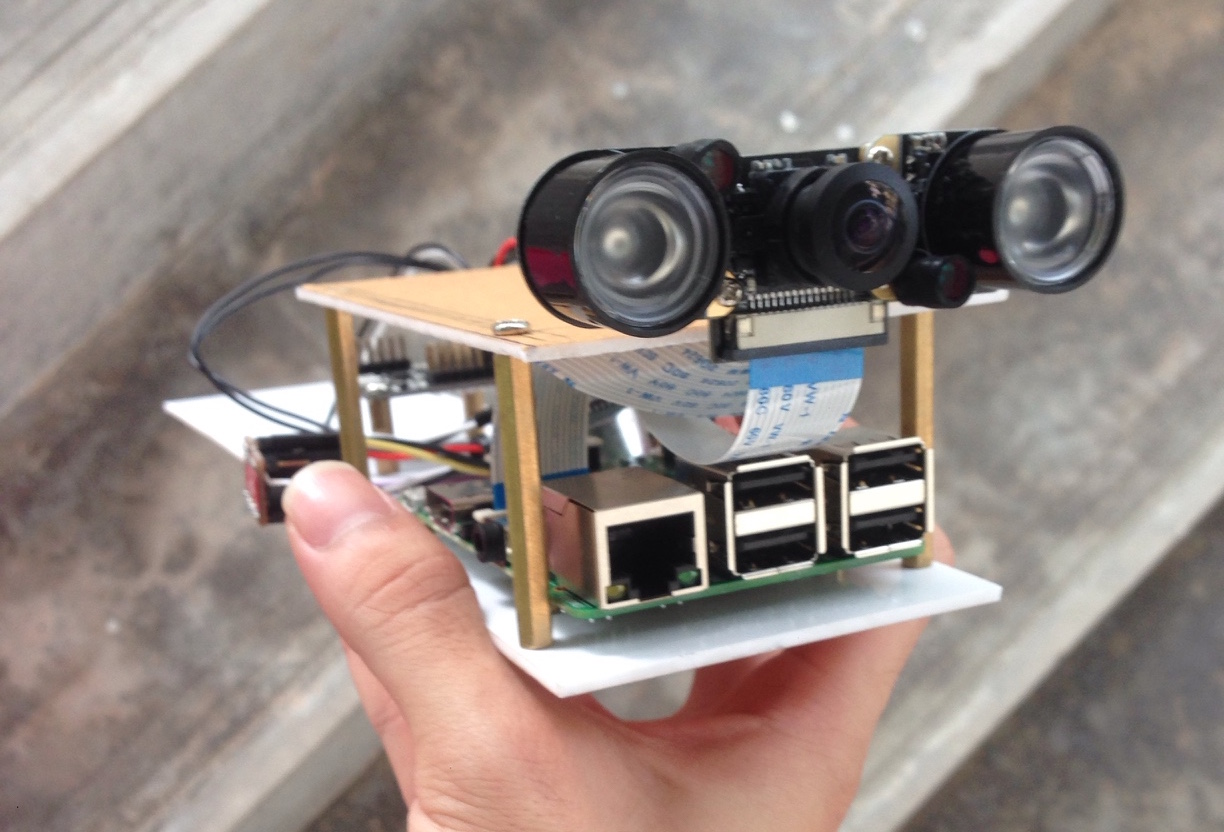
The camera was supposedly for recording a video for playback later t
Hack&Roll is an annual hackathon organised by NUS Hackers. We participated in Hack&Roll 2015 (It was our first hackathon), making this our second Hack&Roll.
There used to be more images here but I broke the links

They say that the best weapon is the one you never have to fire. I respectfully disagree. I prefer the weapon you only have to fire once.
- Tony Stark, Iron Man (2008)
For once, I actually disagree with Tony Stark. In this ever developing age of computing and cyber warfare, most weapons are not really fired. Rather, most warfare occurs rather passively with spy missions or other reconnaissance missions being used to get military secrets from other countries. UAV's like drones and quadcopters are now becoming commonplace in a country's military arsenal and this is becoming a much larger part of military operations than actual invasion and the active act of war. Stealing IP of a country proves to be as effective as the active act of war.
Introduction
This year the Tan Kah Kee Young Inventor's Award (TKKYIA) 2016 launched and as usual we participated in the Defense Science section of it. Defense Science is quite important as we need to equip the country with the required tools and equip
Introduction
In October, the whole team participated in the Singapore Space Challenge (SSC) 2015 in the Unmanned Aerial Systems category. Teams had to conceptualize a system to perform inspection operations on aircraft using UAVs. UAVs are already used in many other industries and also recreation purposes. UAVs can be applied to the Maintenance, Repair and Overhaul tasks on aircraft allow for timely access to parts of an aircraft normally difficult to inspect. Furthermore, the mission specifications state that:
The aerial system can comprise of more than one UAV. Systems comprising of more than 2 UAVs will be favorably graded, provided this does not impact the practicality and viability of the concept and solutions.
We started planning our project based on 4 fundamental objectives: Safety, speed, reliability and ease of operation. Some issues with the mission parameters became immediately clear:
- There would be no GPS signals in a closed hangar where the inspection will likely take p
Recently, team MakerBreak (consisting of me, Isaac and Sudharshan) competed in the student category of Hackathon@SG. The competition theme this year was on "Smart Nation", where we are to work on a project related to building a smart nation. There was even hardware provided by the sponsors, including the Nabu X, VR One and Tweeq.
Of course, as adventurous students, we took the VR One as we wanted to play with VR. It was a nice piece of equipment, being much much better than the Google Cardboard.
We came up with a few ideas, before the hackathon. Most of the students there were studying in university and junior college, and we were among the few secondary students there.

Armed with a (Relay Shield), WiFly RN-XV module, an Arduino Uno, a power adapter, soldering irons, wires